In 2010, physicists Martin Dominik and John Zarnecki ran a Royal Society conference, Towards a Scientific and Societal Agenda on Extra-Terrestrial Life addressing scientific, legal, ethical, and political issues around the search for extra-terrestrial intelligence (SETI). Philosopher Clement Vidal and I both spoke at that conference. It was the first academic venue where I presented my Transcension Hypothesis, the idea that advanced intelligence everywhere may be developmentally-fated to venture into inner space, into increasingly local and miniaturized domains, with ever-greater density and interiority (simulation capacity, feelings, consciousness), rather than to expand into “outer space”, the more complex it becomes. When this process is taken to its physical limit, we get black-hole-like domains, which a few astrophysicists have speculated may allow us to “instantly” connect with all the other advanced civilizations which have entered a similar domain. Presumably each of these intelligent civilizations will then compare and contrast our locally unique, finite and incomplete science, experiences and wisdom, and if we are lucky, go on to make something even more complex and adaptive (a new network? a universe?) in the next cycle.

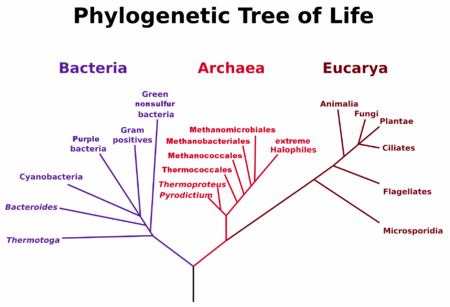
Clement and I co-founded our Evo-Devo Universe complexity research and discussion community in 2008 to explore the nature of our universe and its subsystems. Just as there are both evolutionary and developmental processes operating in living systems, with evolutionary processes being experimental, divergent, and unpredictable, and developmental processes being conservative, convergent, and predictable, we think that both evo and devo processes operate in our universe as well. If our universe is a replicating system, as several cosmologists believe, and if it exists in some larger environment, aka, the multiverse, it is plausible that both evolutionary and developmental processes would self-organize, under selection, to be of use to the universe as complex system. With respect to universal intelligence, it seems reasonable that both evolutionary diversity, with many unique local intelligences, and developmental convergence, with all such intelligences going through predictable hierarchical emergences and a life cycle, would emerge, just as both evolutionary and developmental processes regulate all living intelligences.
Once we grant that developmental processes exist, we can ask what kind of convergences might we predict for all advanced civilizations. One of those processes, accelerating change, seems particularly obvious, even though we still don’t have a science of that acceleration. (In 2003 I started a small nonprofit, ASF, to make that case). But what else might we expect? Does surviving universal intelligence become increasingly good, on average? Is there an “arc of progress” for the universe itself?
Developmental processes become increasingly regulated, predictable, and stable as function of their complexity and developmental history. Think of how much more predictable an adult organism is than a youth (try to predict your young kids thinking or behavior!), or how many less developmental failures occur in an adult versus a newly fertilized embryo. Development uses local chaos and contingency to converge predictably on a large set of far-future forms and functions, including youth, maturity, replication, senescence, and death, so the next generation may best continue the journey. At its core, life has never been about either individual or group success. Instead, life’s processes have self-organized, under selection, to advance network success. Well-built networks, not individuals or even groups, always progress. As a network, life is immortal, increasingly diverse and complex, and always improving its stability, resiliency, and intelligence.
But does universal intelligence also become increasingly good, on average, at the leading edge of network complexity? We humans are increasingly able to use our accelerating S&T to create evil, with both increasing scale and intensity. But are we increasingly free to do so, or are we growing ever-more self-regulated and societally constrained? Steven Pinker, Rutger Bregman, and many others argue we have become increasingly self- and socially-constrained toward the good, for yet-unclear reasons, over our history. Read The Better Angels of Our Nature, 2012 and Humankind, 2021 for two influential books on that thesis. My own view on why we are increasingly constrained to be good is because there is a largely hidden but ever-growing network ethics and empathy holding human civilizations together. The subtlety, power, and value of our ethics and empathy grows incessantly in leading networks, apparently as a direct function of their complexity.
As a species, we are often unforesighted, coercive, and destructive. Individually, far too many of us are power-, possession- or wealth-oriented, zero-sum, cruel, selfish, and wasteful. Not seeing and valuing the big picture, we have created many new problems of progress, like climate change and environmental destruction, that we shamefully neglect. Yet we are also constantly progressing, always striving for positive visions of human empowerment, while imagining dystopias that we must prevent.
Ada Palmer’s science fiction debut, Too Like the Lightening, 2017, is a future world of both technological abundance and dehumanizing, centrally-planned control over what individuals can say, do, or believe. I don’t think Palmer has written a probable future. But this combination of future abundance and overcontrol does seem plausible, under the wrong series of unfortunate and unforesighted future events, decisions and actions. Imagining such dystopias, and asking ourselves how to prevent them, is surely as important as positive visions to improving adaptiveness. I am also convinced we are rapidly and mostly unconsciously creating a civilization that will be ever more organized around our increasingly life-like machines. We can already see that these machines will be far smarter, faster, more capable, more miniaturized, more resource-independent, and more sustainable than our biology. That fast-approaching future will be different from anything Earth’s amazing, nurturing environment has developed to date, and it is not well-represented in science-fiction yet, in my view.
On average, then, I strongly believe our human and technological networks grow increasingly good, the longer we survive, as some real function of their complexity. I also believe that postbiological life is an inevitable development, on all the presumably ubiquitous Earthlike planets in our universe. Not only will many of us merge with such life, it will be far smarter, stabler, more ethical, empathic, and self-constrained than biological life could ever be, as an adaptive network. There is little science today to prove or disprove such beliefs. But they are worth stating and arguing.
Arguing the goodness of advanced intelligence was the subtext of the main debate at the SETI conference mentioned above. The highlight of this event was a panel debate on whether it is a good idea to not only listen for signs of extraterrrestrial intelligence (SETI), but to send messages (METI), broadcasting our existence, and hopefully, increasing the chance that other advanced intelligences communicate with us earlier, rather than later.
One of the most forceful proponents for such METI, Alexander Zaitsev, was at this conference. Clement and I had some good chats with him (see picture below). Since 1999, Zaitsev has been using a radiotelescope in the Ukraine, RT-70, to broadcast “Hello” messages to nearby interesting stars. He did not ask permission, or consult with others, before sending these messages. He simply acted on his belief that doing so would be a good thing, and that those able to receive them would not only be more advanced, but would be inherently more good (ethical, empathic) than us.

Sadly, Zaitsev has now passed away. Today, Paul Gilster wrote a beautiful elegy for him, at his site on interstellar exploration, Centauri Dreams. It explains the 2010 conference, where Zaitsev debated others on the METI question, including David Brin. Brin advocates the most helpful position, one that asks for international and interdisciplinary debate prior to sending of messages. Such debate, and any guidelines it might lead to, can only help us with these important and long-neglected questions.
It was great listening to these titans debate at the conference, yet I also realized how far we are from a science that tells us the general Goodness of the Universe, to validate Zaitzev’s belief. We are a long way from his views being popular, or even discussed, today. Many scientists assume that we live in a randomness-dominated, “evolutionary” universe, when it seems much more likely that it is an evo-devo universe, with both many unpredictable and predictable things we can say about the nature of advanced complexity. Also, far too many of us still believe we are headed for the stars, when our history to date shows that the most complex networks are always headed inward, into zones of ever-greater locality, miniaturization, complexity, consciousness, ethics, empathy, and adaptiveness. As I say in my books, it seems that our destiny is density, and dematerialization. Perhaps all of this will even be proven in some future network science. We shall see.
Note: This post can also be found on Medium, a platform that commendably pays its community for its writing and readership. Medium is also much easier to use than WordPress. I keep this site only as a legacy site at present. Please visit my Medium page to find and comment on my latest posts.
John Smart is a global futurist, and a scholar of foresight process, science and technology, life sciences, and complex systems. His new book, Introduction to Foresight, 2021, is now available on Amazon.